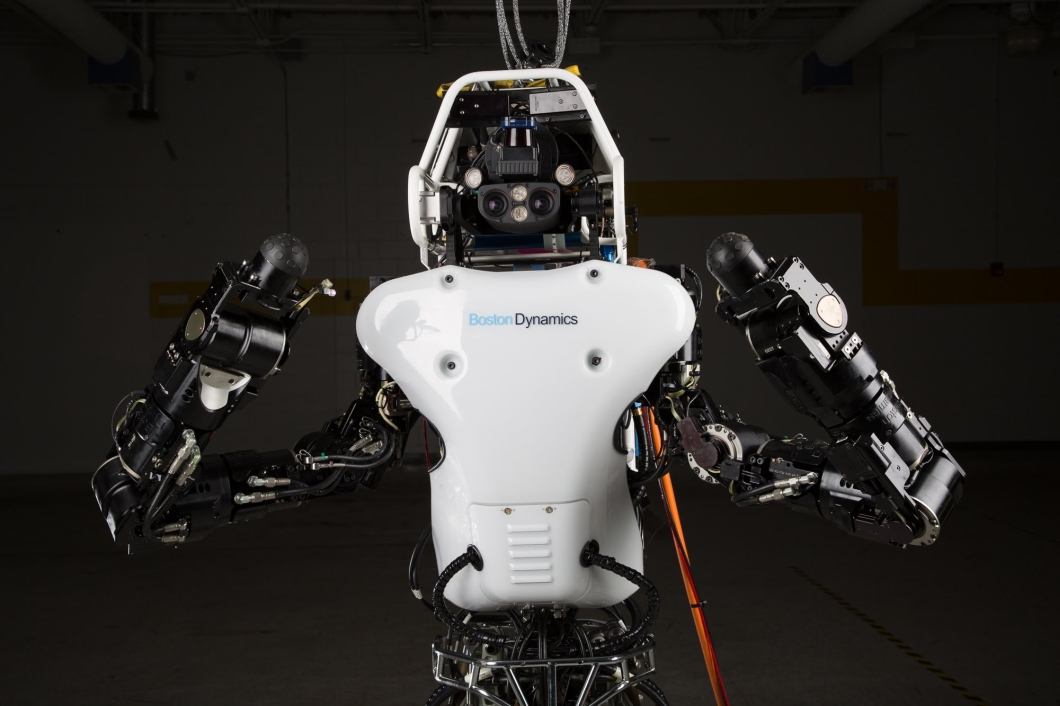
O Atlas, robô bípede que vem sendo desenvolvido pela Boston Dynamics (companhia adquirida pelo Google em 2013), já não é capaz apenas de dar voltinhas no bosque: nos últimos meses, a máquina ganhou a habilidade de realizar determinadas tarefas domésticas.
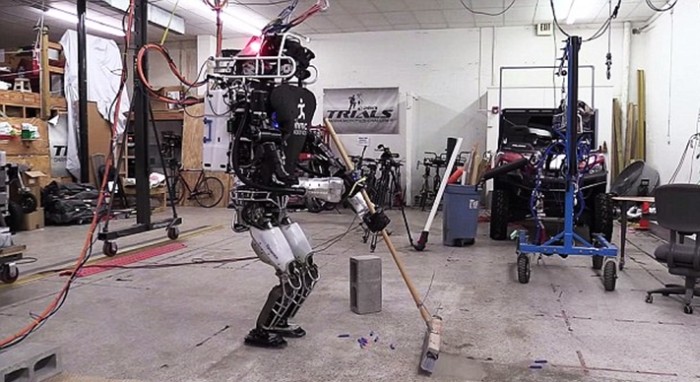
Se eu me deparo com um robô como esse enquanto caminho pelo parque, meu instinto de sobrevivência provavelmente mandará minhas pernas me levarem para bem longe dali — e rápido! Mas saber que o Atlas já é capaz de realizar atividades como organizar móveis, empurrar caixas, passar aspirador de pó e varrer o chão de repente fizeram com que ele me parecesse bem mais amigável.
Embora a execução dessas tarefas seja bem limitada (o Atlas é capaz de empurrar um aspirador, por exemplo, mas não de checar se algum ponto da sala permanece com pó), é impressionante que o robô possa realizá-las. O Atlas começou a ser desenvolvido em 2013 e, com o passar dos meses, recebeu diversos updates para melhorar o seu equilíbrio. Os testes mais recentes mostram que o robô já consegue se movimentar com segurança mesmo segurando objetos.
É exatamente esse o objetivo do Instituto para Cognição Humana e de Máquina (IHMC, na sigla em inglês), entidade responsável por reprogramar o robô: torná-lo capaz de realizar uma ampla variedade de movimentos, até mesmo alguns mais complexos.
Pois é, isso significa que o Atlas não está sendo desenvolvido para cuidar de nossos lares, como o faz a robô Rosie dos Jetsons. As tarefas domésticas servem apenas para dar uma noção da variedade de movimentos que o Atlas pode executar.
Esses feitos se tornam mais impressionantes se nos lembrarmos de que este é um robô bípede. Fazer um robô andar com dois pés mantendo uma postura ereta e, ao mesmo tempo, realizar determinados movimentos com os braços é um grande desafio. Nós, humanos, fazemos sem perceber vários movimentos compensatórios para manter o equilíbrio nas mais diversas situações que é difícil de reproduzir em máquinas.
Há, no entanto, um detalhe importante nessa história toda: os movimentos mostrados no vídeo acima foram realizados com sucesso, porém, o robô esteve quase o tempo todo sendo controlado por John Carff, um dos pesquisadores do IHMC responsáveis pelo experimento.
Controlado, sim, mas não totalmente. Carff explica que deu ao robô várias tarefas (pegar uma garrafa de água, por exemplo) e, basicamente, o Atlas respondeu informando quais movimentos iria executar para realizar a atividade. Coube então a Carff conferir o plano mostrado e “autorizar” o robô a realizá-lo.
A ideia, obviamente, é fazer com que o Atlas seja o mais autônomo possível, ou seja, possa decidir sozinho quais movimentos executar. De todo modo, sempre haverá um humano de prontidão para operá-lo. Aí o robô poderá ser empregado em tarefas mais nobres do que nos impressionar, como desarmar bombas e participar de missões de salvamento em prédios que estão prestes a desabar.
Com informações: Wired