A tecnologia por trás da Rover Curiosity
Às 2 da manhã da segunda-feira (6) a NASA realizou um feito histórico: aterrissou com sucesso a Rover (mistura de robô com veículo) Curiosity na superfície de Marte e deve começar a explorar o planeta vermelho essa semana. Por ter sido lançado no ano passado, a Curiosity é sem dúvida a mais avançada de todas as Rovers, tecnologicamente falando. Quão avançada ela é? Escrevi um post detalhando exatamente quais as tecnologias empregadas nesse importante veículo espacial.
O hardware
Comecemos pela parte mais interessante, a meu ver: os eletrônicos. A Curiosity tem dois computadores chamados RCE, ou Rover Compute Element, e cada um deles tem um processador RAD750 com 200 MHz, capaz de processar 400 milhões de instruções por segundo, 256 MB de memória RAM e 2 GB de memória Flash. Ela tem dois para caso um deles tenha problemas, o outro tome o lugar. Todos os equipamentos são protegidos contra radiação, algo essencial para o bom funcionamento de um computador no espaço.
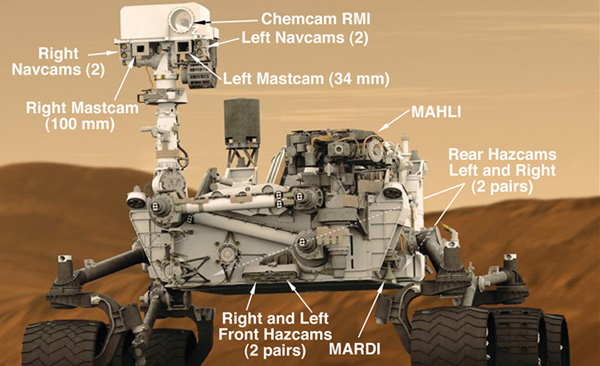
A captura das fotos é feita por 12 câmeras no total, todas espalhadas nos mais variados ângulos. Existem duas principais, chamadas MastCam, que estão está localizadas de forma mais proeminente. Ambas têm capacidade para gravar vídeos de até 720p com 10 fps e capturar imagens estáticas com 1600 x 1200 pixels de resolução, mas diferem no quesito angulação e foco. Outra delas é a HazCam, responsáveis por detectar possíveis problemas de navegação na superfície.
A qualidade da foto é boa, embora a HazCam só consiga capturar em preto e branco. Eis abaixo uma das fotos capturadas pela Hazcam.

Alimentando esse hardware todo, a Curiosity tem um gerador criado pela Boeing (sim, a mesma dos aviões) que tira sua energia da conversão de calor criada por um isótopo de plutônio-238. Ele é capaz de gerar 2,5 quilowatt-hora, mais que o suficiente para a Rover operar.
Fora isso, a Curiosity também tem outra série de equipamentos para análise de solo, umidade, temperatura, velocidade do vento e radiação, além das três antenas UHF responsáveis por transmitir e receber informações. E o conjunto de todos esses componentes deixa o veículo pesado: são quase 1 tonelada de sensores passeando pela superfície de Marte.
O software
Para que o equipamento funcione como deveria, um software bom deve acompanhá-lo. E isso a Curiosity tem de sobra: uma equipe de 30 engenheiros de software da NASA foi a responsável por colocar 2,5 milhões de linhas em C em um chip embarcado no veículo, a maioria delas aperfeiçoados das missões passadas, das Rovers Spirit e Opportunity, lançadas em 2004. Para efeitos de comparação, apenas o kernel do Linux tem 15 milhões de linhas de C e C++.

O código foi bastante otimizado especificamente para o hardware da Curiosity e extensivamente testado usando scripts python para analisar os logs gerados pela Rover. Ele tem mais de 130 módulos diferentes, então é bem provável que um log desse código será bem extenso e complicado de analisar a olho nu. Essa apresentação em PDF disponibilizadas em 2009 por um dos cientistas da NASA envolvidos no projeto exemplifica o quão complexo o código (e os testes) tem que ser para que nada dê errado.
A NASA também disponibilizou grande parte do código das suas Rovers (não só da Curiosity) em seu diretório no Github, então quem quiser montar seu próprio veículo espacial e mandar para algum planeta de forma independente, já pode pegar alguns itens por lá.
Esse conjunto de equipamentos foi criado por mentes nada menos do que brilhantes e que trabalham na NASA com o objetivo de desvendar o que o espaço oferece. O orçamento que o projeto teve era de cerca de US$ 2,5 bilhões e a expectativa é de que o pouso de sucesso da Curiosity provoque uma mudança nesse campo, conseguindo mais investimentos para a NASA e ajudando o ser humano a chegar ainda mais longe. E eu espero que consigam.
Com informações: CNET, NASA 1, 2, StackExchange.