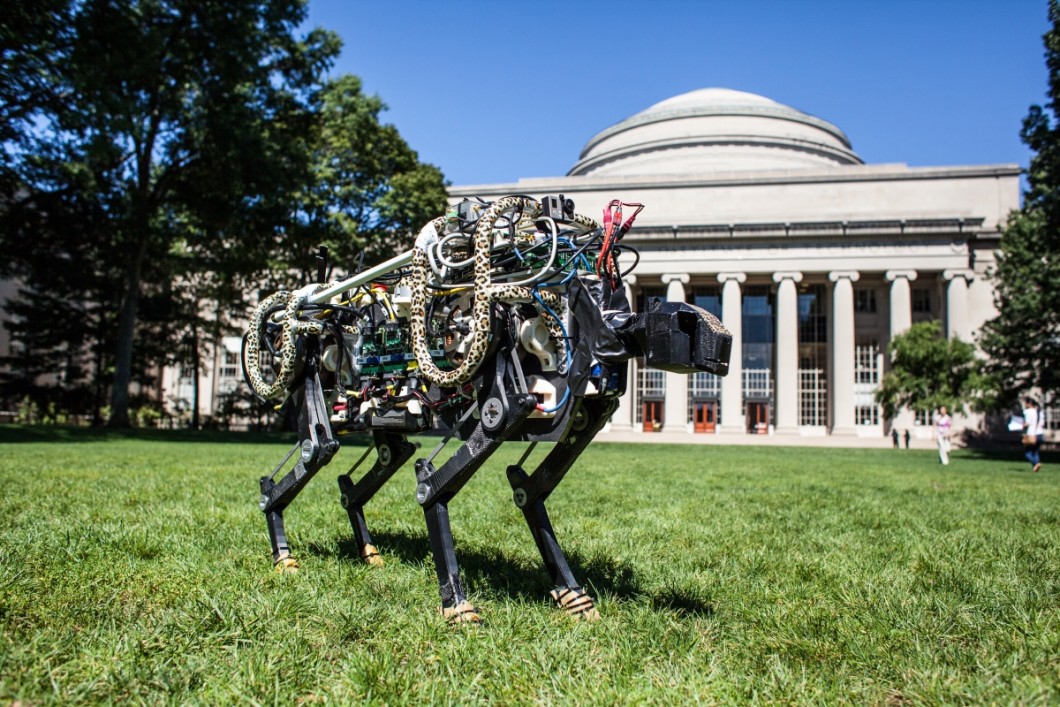
O Cheetah (guepardo) é um robô quadrúpede que ganhou o noticiário em 2012 após bater o recorde de velocidade para uma máquina com “pernas” – na ocasião, 45,5 km/h. Desde então, o Cheetah vem sendo aperfeiçoado. Um dos resultados desses esforços acaba de ser revelado: o robô agora é capaz de pular obstáculos.
Criado pelo MIT em parceria com a DARPA (tendo também envolvimento da Boston Dynamics, companhia de robótica hoje pertencente ao Google), o Cheetah já conseguia pular, no entanto, não era capaz de identificar obstáculos e, assim, saltar no momento certo.
Os pesquisadores resolveram o problema colocando um sensor à laser na parte frontal do robô. Com o componente, o Cheetah consegue mapear o caminho à frente.
As informações geradas são enviadas em tempo real para um algoritmo de três partes. A primeira permite ao robô estimar o tamanho e a distância do obstáculo. A segunda utiliza essa estimativa para prever o melhor momento e a posição para saltar. A terceira entra em ação no momento da ação determinando a trajetória do salto.
Segundo Sangbae Kim, professor de engenharia do MIT e um dos pesquisadores do projeto, o algoritmo foi desenvolvido para viabilizar os saltos, não para otimizá-los. Isso significa que o Cheetah pode dar um pulo maior que o necessário. O importante é que o robô consiga tomar uma decisão rapidamente e executar o salto com sucesso.
Nos testes com uma esteira de 4 metros de comprimento, o Cheetah conseguiu identificar e pular sobre obstáculos em 70% das tentativas. Em uma pista, a quantidade de acertos passou de 90% graças ao espaço maior que o robô tinha para se aproximar e identificar os obstáculos para então planejar o salto.
Os índices de acertos nos testes são muito bons (e invejáveis: com base nas minhas lembranças das aulas de educação física, eu teria caído antes do primeiro obstáculo), mas, obviamente, os cientistas trabalham para melhorá-los, inclusive em condições adversas: o objetivo agora é fazer com que o Cheetah consiga pular em terrenos macios, como um gramado.
Com informações: Phys.org