HERMES, o robô do MIT com movimentos quase humanos
Robôs com aspecto humanoide existem há tempos, mas a maior parte deles serve a fins de entretenimento ou nunca sai dos laboratórios de pesquisa. O HERMES, porém, tem tudo para ser de grande utilidade: o robô é capaz de “imitar” movimentos humanos com bastante precisão, portanto, pode ser empregado em uma série de atividades.

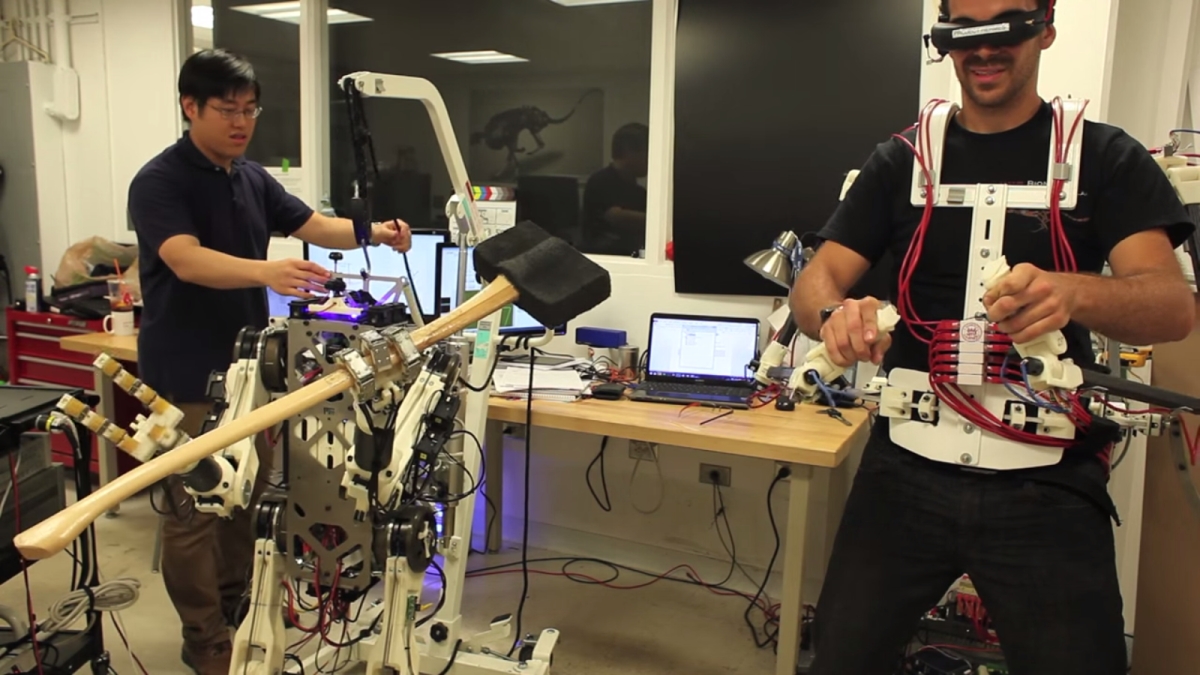
O HERMES está sendo desenvolvido no MIT. Um dos responsáveis é o pesquisador brasileiro João Ramos, que resumiu o projeto como uma “tentativa de colocar o cérebro humano dentro do robô”.
Uma descrição um tanto vaga, não? Mas, quando entendemos como o robô funciona, fica mais fácil assimilar a ideia: o HERMES realiza movimentos com precisão imitando um “mestre”.
Cabe ao “mestre” usar uma espécie de “exoesqueleto”. Os sensores instalados ali detectam os movimentos realizados pela pessoa e os transformam em coordenadas para o robô. Com base nessas informações, o HERMES repete os movimentos executados pelo operador. Tudo acontece quase em tempo real.
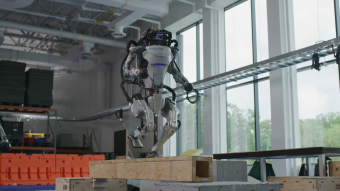
É possível fazer o robô segurar objetos, empurrar itens, realizar movimentos suaves ou que exigem bastante reflexo e por aí vai. As ações, mesmo as mais complexas, são executadas com tamanha destreza e equilíbrio que é difícil não se impressionar.
Mas um robô capaz de se movimentar autonomamente não seria mais interessante? Essa é uma possibilidade considerada para uma etapa futura. Por ora, a principal proposta do projeto é colocar o HERMES para trabalhar em atividades que representam perigo aos humanos.
Um especialista em desarmamento de bombas pode controlar o HERMES a uma distância bem segura para que o robô confira um artefato suspeito, por exemplo. Por meio de uma câmera instalada no que seria a cabeça da invenção, o operador verifica o que tem que ser feito e realiza os movimentos que o robô deve executar para manipular o objeto.
O robô também pode ser usado para exploração de áreas afetadas por acidentes nucleares, para checar as condições internas de um prédio que ameaça desabar, enfim, não é difícil encontrar utilidade para o projeto.
É claro que controlar o robô não é tão simples como dar comandos com um joystick de videogame. Como o HERMES pode executar ações que exigem força, o operador precisa saber, por exemplo, como compensar movimentos para que o robô não perca precisão. A boa notícia é que, além dos sensores em si, o traje conta com mecanismos de balanço que permitem à pessoa ter noção da força empregada em cada ação.
Com informações: Phys.org






Escrito por
